The project utilizes SIFT The algorithm realizes the splicing of two pictures !
stay python terminal Window input the following command , Generate dependent documents :
pip freeze > requirement.txt
The corresponding dependent documents are as follows :
numpy==1.22.4
opencv-contrib-python==4.6.0.66
opencv-python==4.6.0.66
For specific use, please refer to the article I wrote :python Project use requirement.txt Rely on to improve the migration efficiency of the project
Be careful :opencv-contrib-python Why do we need to install additional libraries , because SIFT It's a proprietary algorithm , If used , In general, you'd better configure this library to use , If there is no error prompt !
For subsequent use and debugging of algorithm logic , I encapsulate the common methods into ConPic Methods in class , In the main calling script , Instantiate the class first , Then call the methods in the class !
import cv2
import numpy as np
class ConPic:
def cv_show(self,name, image):
cv2.imshow(name, image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# SIFT Method to detect feature points
def detect(self,image):
# establish SIFT generator
descriptor = cv2.xfeatures2d.SIFT_create()
# testing SIFT Characteristic point , And calculate the descriptors
(kps, features) = descriptor.detectAndCompute(image, None)
# Convert the result to NumPy Array
kps = np.float32([kp.pt for kp in kps])# List generator
# Return to feature point set , And corresponding description features
return (kps, features)
# Feature point matching
def Keypoints(self,kpsA, kpsB, featuresA, featuresB, ratio=0.75, reprojThresh=4.0):
# Build violence matchers
matcher = cv2.BFMatcher()
# Use KNN The test comes from A、B Of Graphs SIFT Feature matching ,K=2
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
for m in rawMatches:
# When the ratio of the nearest distance to the next nearest distance is less than ratio When the value of , Keep this match
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
# Store two points in featuresA, featuresB Index value in
matches.append((m[0].trainIdx, m[0].queryIdx))
# When the filtered match pair is greater than 4 when , Calculate the angle transformation matrix
if len(matches) > 4:
# Get the point coordinates of the matched pair
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# Calculate the angle transformation matrix
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)
# Return results
return (matches, H, status)
# If the match pair is less than 4 when , return None
return None
# Image mosaic
def Matches(self,imageA, imageB, kpsA, kpsB, matches, status):
# Initialize visualization image , take A、B Connect left and right
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
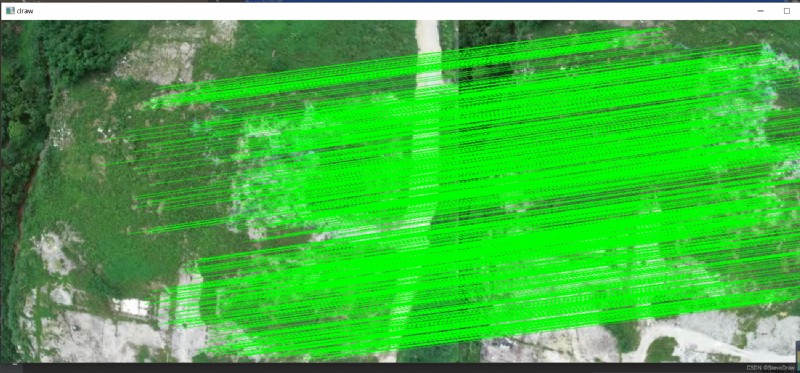
# Joint traversal , Draw a match
for ((trainIdx, queryIdx), s) in zip(matches, status):
# When the point pair match is successful , Draw on the visualization
if s == 1:
# Draw a match
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
self.cv_show("draw", vis)
# Return visualization results
return vis
# Splicing
def stitch(self,imageA, imageB, ratio=0.75, reprojThresh=4.0, showMatches=False):
# testing A、B The image SIFT Key feature points , And calculate the feature descriptors
(kpsA, featuresA) = self.detect(imageA)
(kpsB, featuresB) = self.detect(imageB)
# Match all the feature points of the two pictures , Return matching results
M = self.Keypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)
# If the returned result is empty , There is no feature point matching success , Exit algorithm
if M is None:
return None
# otherwise , Extract matching results
# H yes 3x3 Perspective transformation matrix
(matches, H, status) = M
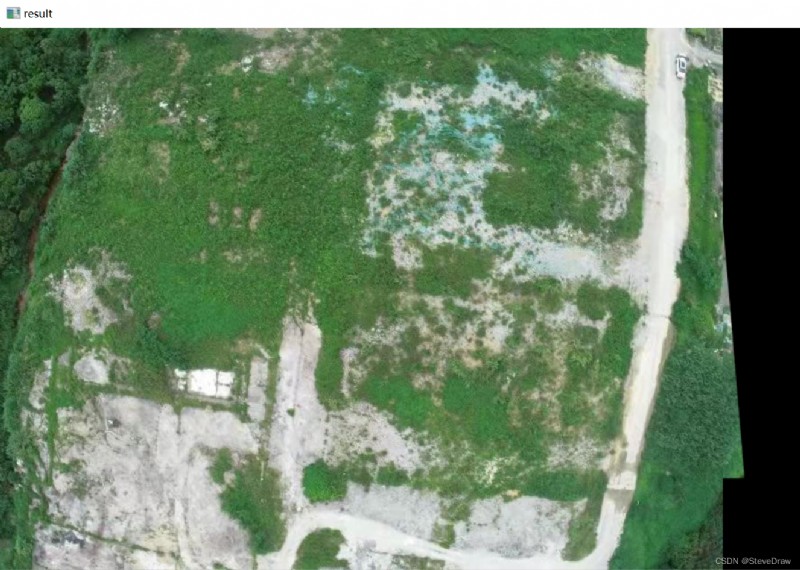
# The picture A Change the angle of view ,result It's the transformed picture
result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
self.cv_show('result', result)
# The picture B Pass in result At the far left of the picture
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
self.cv_show('result', result)
# Check if you need to show a picture match
if showMatches:
# Generate matching pictures
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
# Return results
return (result, vis)
# Return matching results
return result
import cv2
from ConPic import ConPic
pic=ConPic()
# Read images
imageA = cv2.imread('D:/W-File/1.jpg')
pic.cv_show("imageA", imageA)
imageB = cv2.imread('D:/W-File/2.jpg')
pic.cv_show("imageB", imageB)
# Calculation SIFT Feature points and feature vectors
(kpsA, featuresA) = pic.detect(imageA)
(kpsB, featuresB) = pic.detect(imageB)
# A homography matrix is obtained based on nearest neighbor and random sampling consistency
(matches,H,status) = pic.Keypoints(kpsA, kpsB, featuresA, featuresB)
print(" Homotropic moment :{0}",H)
# Draw matching results
pic.Matches(imageA, imageB, kpsA, kpsB, matches, status)
# Splicing
pic.stitch(imageA, imageB)
Homography matrix :{
0} [[ 9.30067818e-01 -7.68408000e-02 3.15693821e+01]
[ 7.03517944e-03 8.84141290e-01 -9.47559365e+01]
[ 2.27565291e-06 -1.94163643e-04 1.00000000e+00]]

Finally, if there are deficiencies in the text , it is respectful to have you criticize and correct sth !