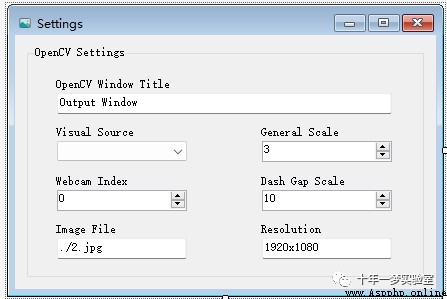
C# Interface
Executable program
Video demo
note :
One 、C# call Python Script program
Controls used ConsoleControl.
corePath = "./core.py";//python Script
corePathExe = "core.exe"; //python Generated executable file
private void startBtn_Click(object sender, EventArgs e)
{
switch (File.Exists(corePathExe))//python There is an executable file ?
{
case true:// There is
if (!File.Exists(corePathExe)) return;
appConsole.StartProcess("cmd", $"/c {corePathExe}");//ConsoleControl Control start-up python process : "core.exe"
break;
case !false:
if (!File.Exists(corePath)) return;
appConsole.StartProcess("cmd", $"/c @python {corePath}");// start-up python Script :"./core.py"
break;
default:
break;
}
/*
ProcessStartInfo startInfo = new ProcessStartInfo();
startInfo.FileName = "python";
startInfo.Arguments = corePath;
startInfo.UseShellExecute = true;
Process.Start(startInfo);
*/
menuCtrl.SelectedIndex = 1;// Set up Tab Control Activity page
if (closeCheck.Checked) this.WindowState = FormWindowState.Minimized;// Check the box , Minimize forms
}Two 、Python Script : Object size detection
2.1 core.py
import cv2
import helper
import json
img_f = open('./settings.json') # Reading configuration
settings = json.load(img_f) # Load configuration parameters
webcam = settings['useWebcam'] # Whether to use webcam
path = settings['imgFilePath'] # Picture path
cap = cv2.VideoCapture(int(settings['webcamIndex']))# Turn on the camera
dashed_gap = int(settings['dashGapScale']) # Dotted line Dash spacing
cap.set(10, 160) #https://blog.csdn.net/qq_43797817/article/details/108096827 10:CV_CAP_PROP_BRIGHTNESS The brightness of the image ( Only for cameras )
resArray = settings['resolution'].split('x') # The resolution of the
#print(int(resArray[0]), int(resArray[1]))
cap.set(3, int(resArray[0])) #3:CV_CAP_PROP_FRAME_WIDTH The width of the frame in the video stream .
cap.set(4, int(resArray[1])) #4:CV_CAP_PROP_FRAME_HEIGHT The height of the frame in the video stream
scale = int(settings['generalScale']) # The proportion : Image pixels And CM The proportion of
wP = 210 * scale #210*3=630
hP = 297 * scale #297*3=891
windowName = settings['windowName'] # Window title
print('Settings loaded.') #
checkPrintLoop = False # Image processing polling did not start
while True:
if checkPrintLoop == False:
print('Image process loop started.')
checkPrintLoop = True
if webcam:# Use a webcam
success, img = cap.read() # Read a frame
imgLast = img # Get the latest frame
else:
img = cv2.imread(path) # Read a frame of image
imgContours, conts = helper.getBorders(img, minArea=50000, filter=4) # Get quadrilateral bounding box
if len(conts) != 0: # Find the object
biggest = conts[0][2] # Fitted quadrilateral
# print(biggest)
imgWarp = helper.warpImg(img, biggest, wP, hP) # Projection maps and scales the image Zoom the image to WP,hP Size
imgContours2, conts2 = helper.getBorders(imgWarp, minArea=2000, filter=4, cThr=[50, 50], draw=False) # Search for rectangular bounding boxes on images mapped to rectangles The area is larger than 2000, quadrilateral
if len(conts) != 0: # Find the boundary quadrilateral
for obj in conts2: # Traverse the found bounding box array : Sort from large to small
#print(obj[2])
#cv2.polylines(imgContours2, helper.getDashedPoint(obj[2]), True, (0, 140, 255), 2)
#helper.drawpoly(imgContours2, [obj[2]], (0, 140, 255), 2)
nPoints = helper.reorder(obj[2]) # Reorder quadrilateral corners
nW = round((helper.findDis(nPoints[0][0]//scale, nPoints[1][0]//scale)/10), 1) # True width dimension Floor removal ( Divide and conquer ) x // y
nH = round((helper.findDis(nPoints[0][0]//scale, nPoints[2][0]//scale)/10), 1) # True height
#objDef1 = (nPoints[0][0][0], nPoints[0][0][1]), (nPoints[1][0][0], nPoints[1][0][1]) #
#objDef2 = (nPoints[0][0][0], nPoints[0][0][1]), (nPoints[2][0][0], nPoints[2][0][1]) #
#print(obj[2][0][0], obj[2][1][0])
# Draw a quadrilateral dotted line Images , The starting point , End , Color , Line width , Default point type , Dash spacing
helper.dashLine(imgContours2, obj[2][0][0], obj[2][1][0], (0, 140, 255), 2, 'dotted', dashed_gap)
helper.dashLine(imgContours2, obj[2][1][0], obj[2][2][0], (0, 140, 255), 2, 'dotted', dashed_gap)
helper.dashLine(imgContours2, obj[2][2][0], obj[2][3][0], (0, 140, 255), 2, 'dotted', dashed_gap)
helper.dashLine(imgContours2, obj[2][3][0], obj[2][0][0], (0, 140, 255), 2, 'dotted', dashed_gap)
#helper.dashLine(imgContours2, objDef2[0], objDef2[1], (0, 140, 255), 2)
#cv2.arrowedLine(imgContours2, objDef1[0], objDef1[1], (255, 0, 255), 3, 8, 0, 0.05)
#cv2.arrowedLine(imgContours2, objDef2[0], objDef2[1], (255, 0, 255), 3, 8, 0, 0.05)
x, y, w, h = obj[3] # Border rectangle
#print(x, y, w, h)
cv2.putText(imgContours2, '{}cm'.format(nW), (x + 30, y - 10), cv2.QT_FONT_NORMAL, 0.5, (0, 0, 0), 1) # Show What's the width cm
cv2.putText(imgContours2, '{}cm'.format(nH), (x - 70, y + h // 2), cv2.QT_FONT_NORMAL, 0.5,(0, 0, 0), 1) # Display height How many? cm
imgLast = imgContours2 # The final image to display : There is dimension information
#cv2.imshow('A4', imgContours2)
img = cv2.resize(img, (0, 0), None, 0.5, 0.5) # Zoom image If dsize Set to 0(None), Then press fx And fy The output image size is obtained by multiplying the original image size
cv2.imshow(windowName, imgLast) # Show
k =cv2.waitKey(0) # Wait indefinitely for the key
if k == 27: break # On the keyboard Esc The key value of the key
if cv2.getWindowProperty(windowName, cv2.WND_PROP_VISIBLE) <= 0:
cv2.destroyAllWindows()
break2.2 helper.py
from operator import index
import cv2
import numpy as np
# The image processing , Find the bounding box
def getBorders(img,cThr=[100,100],showCanny=False,minArea=1000,filter=0,draw =False):
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # grayscale
imgBlur = cv2.GaussianBlur(imgGray,(5,5),1) # Gauss filtering
imgCanny = cv2.Canny(imgBlur,cThr[0],cThr[1]) #canny edge detection , cThr: Minimum threshold 、 Maximum
kernel = np.ones((5,5)) # Convolution kernel size
imgDial = cv2.dilate(imgCanny,kernel,iterations=3) # Expansion operation
imgThre = cv2.erode(imgDial,kernel,iterations=2) # Corrosion operation
if showCanny:cv2.imshow('Canny',imgThre) # Show edge detection results , Default false, No display
contours,hiearchy = cv2.findContours(imgThre,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) # Search for contours
finalCountours = []
for i in contours: # Traverse search results
area = cv2.contourArea(i) # The first i+1 Contour area https://www.jianshu.com/p/6bde79df3f9d
if area > minArea: # Greater than the set area threshold
peri = cv2.arcLength(i,True) # Calculate the perimeter of the contour
approx = cv2.approxPolyDP(i,0.02*peri,True) # Polygon fitting of contour
bbox = cv2.boundingRect(approx) # A rectangular box of polygons boundingRect、minAreaRect Find the smallest positive rectangle of the package outline 、 Minimum diagonal rectangle https://www.cnblogs.com/bjxqmy/p/12347355.html
if filter > 0: # Filter according to the number of edges of the fitted polygon 0: No filtering
if len(approx) == filter:
finalCountours.append([len(approx),area,approx,bbox,i]) # Add to the final boundary result array
else:
finalCountours.append([len(approx),area,approx,bbox,i]) # Number of edges , area , Approximate polygon , Bounding box , outline
finalCountours = sorted(finalCountours,key = lambda x:x[1] ,reverse= True) #reverse = True Descending , reverse = False Ascending ( Default ) Final bounding box array : area Sort
if draw:
for con in finalCountours:
cv2.drawContours(img,con[4],-1,(0,0,255),3) # Draw a red outline ,
return img, finalCountours # Returns the grayscale image ( May have a contour ), Final contour array
# Reorder the fitted quadrilateral 4 The point of
def reorder(myPoints):
#print(myPoints.shape)
myPointsNew = np.zeros_like(myPoints) # Initialization point array
myPoints = myPoints.reshape((4,2)) #4 A little bit x,y
add = myPoints.sum(1) #array.sum(axis =1), Yes array Add each line of
myPointsNew[0] = myPoints[np.argmin(add)] # Top left corner https://blog.csdn.net/qq_37591637/article/details/103385174
myPointsNew[3] = myPoints[np.argmax(add)] # Lower right corner
diff = np.diff(myPoints,axis=1)#y Calculate the number... Along the specified axis N The discrete difference of dimensions The first difference is caused by out[i]=x[i+1]-a[i]
myPointsNew[1]= myPoints[np.argmin(diff)] # Lower left corner
myPointsNew[2] = myPoints[np.argmax(diff)] # Top right corner
return myPointsNew
# Get the corner specified by the sorted index
def getorder(myPoints, index):
#print(myPoints.shape)
myPointsNew = np.zeros_like(myPoints)
myPoints = myPoints.reshape((4,2))
add = myPoints.sum(1)
myPointsNew[0] = myPoints[np.argmin(add)]
myPointsNew[3] = myPoints[np.argmax(add)]
diff = np.diff(myPoints,axis=1)
myPointsNew[1]= myPoints[np.argmin(diff)]
myPointsNew[2] = myPoints[np.argmax(diff)]
return myPointsNew[index]
# Compress image , Approximate quadrilateral projection mapping , Intercept most
def warpImg(img,points,w,h,pad=20):
# print(points)
points = reorder(points) # Reorder the four corners
pts1 = np.float32(points) # Floating point array : Reorder the fitted image corners
pts2 = np.float32([[0,0],[w,0],[0,h],[w,h]]) # Transformed image vertex
matrix = cv2.getPerspectiveTransform(pts1,pts2) # Get projection mapping (Projective Mapping) Perspective transformation (Perspective Transformation) matrix
imgWarp = cv2.warpPerspective(img,matrix,(w,h)) # Projection mapping
imgWarp = imgWarp[pad:imgWarp.shape[0]-pad,pad:imgWarp.shape[1]-pad] # Get rid of pad Border filling
return imgWarp
# Calculate the distance between two points
def findDis(pts1,pts2):
return ((pts2[0]-pts1[0])**2 + (pts2[1]-pts1[1])**2)**0.5
# Is it divisible
def checkDivide(num, num2):
boolDef = (num % num2) == 0
return (boolDef)
# obtain points Points specified in the index
def getPoint(points, _index):
newPoints = []
for _point in points:
newPoints.append(_point)
_lastValue = newPoints[_index]
return _lastValue
# Draw broken lines A straight line
def dashLine(img,pt1,pt2,color,thickness=1,style='dotted',gap=20):
dist =((pt1[0]-pt2[0])**2+(pt1[1]-pt2[1])**2)**.5
#dist = dist * 3
pts= []
for i in np.arange(0,dist,gap):
r=i/dist
x=int((pt1[0]*(1-r)+pt2[0]*r)+.5)
y=int((pt1[1]*(1-r)+pt2[1]*r)+.5)
p = (x,y)
pts.append(p)
if style=='dotted':
for p in pts:
cv2.circle(img,p,thickness,color,-1)
else:
s=pts[0]
e=pts[0]
i=0
for p in pts:
s=e
e=p
if i%2==1:
cv2.line(img,s,e,color,thickness)
i+=1
# Draw polygon -
def drawpoly(img,pts,color,thickness=1,style='dotted',):
s=pts[0]
e=pts[0]
pts.append(pts.pop(0))
i=0
for p in pts:
if p==e:continue
s=e # The starting point
if p==p[len(p)-1]:e=pts[0]
e=p # to update end spot
dashLine(img,s,e,color,thickness,style)3、 ... and 、json Parameters C# Read and write operations
setting.json file
{"useWebcam":false,"webcamIndex":0,"imgFilePath":"./3.jpg","generalScale":3,"dashGapScale":10,"resolution":"1920x1080","windowName":"Output Window"}json Configuration class
using System.Text;
using Newtonsoft.Json;
using System.IO;
using System.Collections.Generic;
namespace ObjectMeasurement
{
public class CoreSettings
{
// Property configuration class
private class CoreProperties// Configuration class
{
public bool useWebcam { get; set; }// Use a webcam
public int webcamIndex { get; set; }// Camera index
public string imgFilePath { get; set; }// Picture path
public int generalScale { get; set; }// The proportion
public int dashGapScale { get; set; }//
public string resolution { get; set; }// The resolution of the
public string windowName { get; set; }// Window title
}
// Private variables
private bool a_useWebcam { get; set; }
private int a_webcamIndex { get; set; }
private string a_imgFilePath { get; set; }
private int a_generalScale { get; set; }
private int a_dashGapScale { get; set; }
private string a_resolution { get; set; }
private string a_windowName { get; set; }
// Public attributes
public bool useWebcam { get; private set; }
public int webcamIndex { get; private set; }
public string imgFilePath { get; private set; }
public int generalScale { get; private set; }
public int dashGapScale { get; private set; }
public string resolution { get; private set; }
public string windowName { get; private set; }
private string jsonPath { get; set; }// Serialized string
// Constructors 1: Load serialization string
public CoreSettings(string _jsonPath)
{
jsonPath = _jsonPath;
LoadJson();// Load serialization string , Deserialization , Set configuration
}
// Constructors 2: Load parameters
public void Configure(bool _useWebcam, int _webcamIndex,
string _imgFilePath, int _generalScale,
int _dashGapScale, string _resolution, string _windowName)
{
useWebcam = _useWebcam;
webcamIndex = _webcamIndex;
imgFilePath = _imgFilePath;
generalScale = _generalScale;
dashGapScale = _dashGapScale;
resolution = _resolution;
windowName = _windowName;
//
a_useWebcam = _useWebcam;
a_webcamIndex = _webcamIndex;
a_imgFilePath = _imgFilePath;
a_generalScale = _generalScale;
a_dashGapScale = _dashGapScale;
a_resolution = _resolution;
a_windowName = _windowName;
}
// load json character string
public void LoadJson()
{
string json = File.ReadAllText(jsonPath);
CoreProperties loadedSettings = JsonConvert.DeserializeObject<CoreProperties>(json);// Deserialization
Configure(loadedSettings.useWebcam, loadedSettings.webcamIndex,
loadedSettings.imgFilePath, loadedSettings.generalScale, loadedSettings.dashGapScale,
loadedSettings.resolution, loadedSettings.windowName);// To configure
}
// Save serialized objects
public void Save()
{
CoreProperties properties = new CoreProperties
{
useWebcam = a_useWebcam,
webcamIndex = a_webcamIndex,
imgFilePath = a_imgFilePath,
generalScale = a_generalScale,
dashGapScale = a_dashGapScale,
resolution = a_resolution,
windowName = a_windowName
};
string writeJson = JsonConvert.SerializeObject(properties).ToString();// Configure class serialization
/*
Dictionary<string, string> replacePairs = new Dictionary<string, string>();
replacePairs.Add("_useWebcam", "useWebcam");
replacePairs.Add("_webcamIndex", "webcamIndex");
replacePairs.Add("_imgFilePath", "imgFilePath");
replacePairs.Add("_generalScale", "generalScale");
replacePairs.Add("_dashGapScale", "dashGapScale");
replacePairs.Add("_resolution", "resolution");
replacePairs.Add("_windowName", "windowName");
replacePairs.Add("_", "");
foreach (KeyValuePair<string, string> item in replacePairs)
{
string key = item.Key;
writeJson.Replace(key.ToString(), item.Value.ToString());
}
*/
// System.Windows.Forms.MessageBox.Show(JsonConvert.SerializeObject(properties));
File.WriteAllText(jsonPath, JsonConvert.SerializeObject(properties));// Save the serialized configuration
}
}
}json Parameter loading and saving
// When you close a window , Read parameter setting configuration
private void SettingsForm_FormClosing(object sender, FormClosingEventArgs e)
{
bool _useWebcam = settings_visualSource.SelectedItem.ToString() == "Web Camera";
int _webcamIndex = Convert.ToInt32(settings_WebcamIndex.Value);
string _imgFilePath = settings_ImageFile.Text.ToString();
int _generalScale = Convert.ToInt32(settings_GeneralScale.Value);
int _dashGapScale = Convert.ToInt32(settings_DashGapScale.Value);
string _resolution = settings_Resolution.Text.ToString();
string _windowName = settings_WindowTitle.Text.ToString();
MainForm.coreSettings.Configure(_useWebcam, _webcamIndex, _imgFilePath, _generalScale, _dashGapScale, _resolution, _windowName);
MainForm.coreSettings.Save();
}
private void SettingsForm_Load(object sender, EventArgs e)
{
CoreSettings core = MainForm.coreSettings;
core.LoadJson();
if (core.useWebcam)
{
settings_visualSource.SelectedIndex = 0;
}
else
{
settings_visualSource.SelectedIndex = 1;
}
settings_WebcamIndex.Value = core.webcamIndex;
settings_ImageFile.Text = core.imgFilePath;
settings_GeneralScale.Value = core.generalScale;
settings_DashGapScale.Value = core.dashGapScale;
settings_Resolution.Text = core.resolution;
settings_WindowTitle.Text = core.windowName;
} Reference resources :
https://blog.csdn.net/u010636181/article/details/80659700