截圖
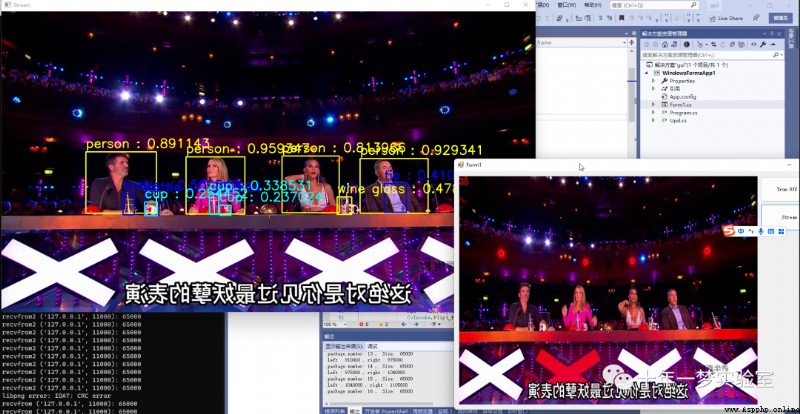
演示錄屏
預訓練模型文件
筆記:
一、udp客戶端C#類
using System;
using System.IO;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Net;
using System.Net.Sockets;
using System.Drawing;
using System.Text.Json;
namespace WindowsFormsApp1
{
public class Upd
{
private IPAddress serverIP = IPAddress.Parse("127.0.0.1");//192.168.0.100
private static int max_size = 65000;//發送單個包大小
private UdpClient udpClient = new UdpClient(11000);
private class Packs_Info
{
public int packs_num { get; set; }
}
public byte[] ImageToByte(Image img)
{
using (var stream = new MemoryStream())
{
img.Save(stream, System.Drawing.Imaging.ImageFormat.Png);
return stream.ToArray();
}
}
//發送圖像
public void SendData(Image img)
{
try
{
udpClient.Connect(serverIP, 11000);
var buffer = ImageToByte(img);//圖像
var num_packs = 1;
if (buffer.Length > max_size)
{
num_packs = (int)Math.Ceiling((double)buffer.Length / max_size);
}
var packs_info = new Packs_Info { packs_num = num_packs };//包信息
var packs_info_json = JsonSerializer.Serialize<Packs_Info>(packs_info);//包信息序列化
//var packs_info_Bytes = Encoding.ASCII.GetBytes(packs_info_json);
var packs_info_Bytes = Encoding.ASCII.GetBytes(packs_info_json);
udpClient.Send(packs_info_Bytes, packs_info_Bytes.Length);//發送數據包信息
var left = 0;
var right = max_size;
if (num_packs == 1)//單個圖像占用字節數小於max_size
{
udpClient.Send(buffer, buffer.Length);//一次發送圖像
Console.WriteLine("package number: {0} , Size: {1} ", num_packs, buffer.Length);
}
else//多包構成一個圖像
{
for (int i = 0; i < num_packs; i++)//分多個包發送單個圖像
{
Console.WriteLine("left : {0} , right : {1}", left, right);
var temp = 0;
var data = new byte[max_size];
for (int j = left; j < right; j++)
{
if (j == buffer.Length)
break;
data[temp] = buffer[j];
temp++;
}
left = right;//更新下一包的起點
right += max_size;//下一包的終點
udpClient.Send(data, data.Length);//發送一個包
Console.WriteLine("package number: {0} , Size: {1} ", i, data.Length);
}
}
}
catch (Exception e)
{
Console.WriteLine(e.ToString());
}
}
//接收數據:識別結果字符串
public string ReceiveData()
{
var RemoteIpEndPoint = new IPEndPoint(serverIP, 11000);
var receiveBytes = udpClient.Receive(ref RemoteIpEndPoint);
// var jsonString = Encoding.ASCII.GetString(receiveBytes);
var jsonString = Encoding.ASCII.GetString(receiveBytes);
var box_info = JsonSerializer.Deserialize<Box_Info>(jsonString);
Console.WriteLine("box {0} , color: {1} ", box_info.box, box_info.color);
return jsonString;
//var box_info = JsonSerializer.Deserialize<Box_Info>(jsonString);
//Console.WriteLine("box {0} , color: {1} ", box_info.box, box_info.color);
}
private class Box_Info
{
public string name { get; set; }//
public int[] box { get; set; }//邊框x,y,w,h數組
public string label { get; set; }//標簽
public int[] color { get; set; }//邊框顏色數組
}//邊框信息
public string stopStream()
{
udpClient.Close();
return "stoped";
}
}
}二、C#主窗體類代碼
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Threading;
using System.IO;
using System.Windows.Forms;
using Emgu.CV;
using System.Text.Json;
using Emgu.CV.Structure;
using Emgu.CV.CvEnum;
namespace WindowsFormsApp1
{
public partial class Form1 : Form
{
private VideoCapture objCapture;//視頻捕獲
private Mat _frame;
private Mat _frame_before;
private bool isOpen = true;//打開視頻流
private bool is_stream = true;
private int Fps;//幀率
private Thread thread_stream;//udp發送圖像線程
private Thread thread_receive;//接收線程
public string box_info_str;//邊框信息字符串 private
public static object lockObj = new Object();//鎖
private Upd udp;
private class Box_Info
{
public string name { get; set; }//
public int[] box { get; set; }//邊框x,y,w,h數組
public string label { get; set; }//標簽
public int[] color { get; set; }//邊框顏色數組
}//邊框信息
public Form1()
{
InitializeComponent();
}
//處理圖像
private void ProcessFrame(object sender, EventArgs e)
{
if (objCapture != null && objCapture.Ptr != IntPtr.Zero)
{
objCapture.Retrieve(_frame_before, 0);//讀取一幀->_frame_before
Fps = (int)objCapture.Get(CapProp.Fps);//獲取幀率
CvInvoke.Flip(_frame_before, _frame, FlipType.Horizontal);//水平反轉圖像
if (box_info_str != null)
{
var box_info = JsonSerializer.Deserialize<Box_Info>(box_info_str);//反序列化邊框信息
var rectangle = new Rectangle(box_info.box[0], box_info.box[1], box_info.box[2], box_info.box[3]);//邊框
var mcvScalar = new MCvScalar(box_info.color[0], box_info.color[1], box_info.color[2]);//顏色
CvInvoke.Rectangle(_frame, rectangle, mcvScalar, 2);//繪制邊框
//顯示標簽
CvInvoke.PutText(_frame, box_info.label, new Point(box_info.box[0], box_info.box[1] - 10), FontFace.HersheyComplexSmall, 1, mcvScalar, 2);
}
//顯示幀率
CvInvoke.PutText(_frame, Fps.ToString(), new Point(0, 25), FontFace.HersheyComplexSmall, 1.5, new MCvScalar(0, 0, 255), 2);
Mat temp = new Mat();
_frame.CopyTo(temp);
CvInvoke.Resize(temp, temp, pictureBox1.Size);
pictureBox1.Image = temp.ToBitmap();//顯示圖像
temp.Dispose();
Thread.Sleep(3000 / (Fps));
}
}
private void button1_Click(object sender, EventArgs e)
{
if (isOpen)
{
button1.Text = "Trun Off Camera";
objCapture = new VideoCapture("test.mp4");//打開測試視頻
objCapture.ImageGrabbed += ProcessFrame;//捕獲幀事件處理函數
_frame = new Mat();
_frame_before = new Mat();
if (objCapture != null)
objCapture.Start();//開始播放
isOpen = false;
}
else
{
button1.Text = "Trun On Camera";
objCapture.Stop();//停止播放
isOpen = true;
}
// isOpen = !isOpen;
}
private void button2_Click(object sender, EventArgs e)
{
if (is_stream)
{
udp = new Upd();//實例化udp
button2.Text = "Stream Stop";
thread_stream = new Thread(stream);//發送視頻流處理函數
thread_receive = new Thread(receive);//接收python返回的數據
thread_stream.Start();
thread_receive.Start();
}
else
{
thread_stream.Abort();
thread_receive.Abort();
udp.stopStream();//關閉udp客戶端
button2.Text = "Stream Start";
}
is_stream = !is_stream;
}
private void stream()
{
try
{
while (true)
{
udp.SendData(_frame_before.ToBitmap());//一幀一幀的發送視頻圖像
Thread.Sleep(3000 / (Fps));
}
}
catch (ThreadAbortException e)
{
Console.WriteLine("Stream Stopping");
}
finally
{
Console.WriteLine("Stream Stopped");
}
}
private void receive()
{
try
{
while (true)
{
lock (lockObj)
{
box_info_str = udp.ReceiveData();//接收返回的目標檢測信息
}
Console.WriteLine(box_info_str);
}
}
catch (ThreadAbortException e)
{
Console.WriteLine("Receive Stopping");
}
finally
{
Console.WriteLine("Receive Stopped");
}
}
}
}三、Python udp服務器端
import socket
import json
import numpy as np
#import cv2
from cv2 import cv2
import queue
import time
HOST = '127.0.0.1'#192.168.0.100
PORT = 11000
Max_size = 65000
packs_info = None
frame = None
class_names = []
frame_data = None
CONFIDENCE_THRESHOLD = 0.2
NMS_THRESHOLD = 0.4
COLORS = [(0, 255, 255), (255, 255, 0), (0, 255, 0), (255, 0, 0)]
frame_buffer = queue.Queue()
#net = cv2.dnn.readNet('model/yolov4-tiny.cfg','model/yolov4-tiny.weights')
net = cv2.dnn.readNet('model/yolov4.cfg','model/yolov4.weights')
#net = cv2.dnn.readNet('model/yolov4-custom.cfg','model/yolov4-custom.weights')
net.setPreferableBackend(cv2.dnn.DNN_BACKEND_CUDA)
net.setPreferableTarget(cv2.dnn.DNN_TARGET_CUDA)#_FP16
model = cv2.dnn_DetectionModel(net)
model.setInputParams(size=(416, 416),scale=1/255,swapRB=True)
#model.setInputParams(size=(608, 608),scale=1/255,swapRB=True)#size=(608, 608)
with open("model/coco_classes.txt", "r") as f:
class_names = [cname.strip() for cname in f.readlines()]
s = socket.socket(socket.AF_INET,socket.SOCK_DGRAM)
s.bind((HOST, PORT))
print('server start at: %s:%s' % (HOST, PORT))
print('wait for connection...')
def img_decode(indata):
_frame = np.frombuffer(indata, dtype=np.uint8)
_frame = _frame.reshape(_frame.shape[0], 1)
_frame = cv2.imdecode(_frame, cv2.IMREAD_COLOR)
_frame = cv2.flip(_frame, 1)
return _frame
while True:
indata, addr = s.recvfrom(Max_size)
print('recvfrom ' + str(addr) + ': ' + str(len(indata)))
#check package is information or image data
if len(indata) < 50:
packs_info = json.loads(indata.decode())
print(packs_info)
else:
indata_buffer = []
indata_buffer.append(indata)
if packs_info:
package_size = packs_info['packs_num']
if package_size == 1:
frame = img_decode(indata_buffer[0])
frame_buffer.put(frame)
#combine the image data, whilch is oversize
else:
frame_data = None
waiting_num = 0
start = 0
end = 0
run_time = 0
while True:
start = time.process_time()
indata, addr = s.recvfrom(Max_size)
if len(indata) > 50:
print('recvfrom2 ' + str(addr) + ': ' + str(len(indata)))
indata_buffer.append(indata)
if len(indata_buffer) == package_size:
for i in indata_buffer:
if frame_data is None:
frame_data = i
else:
frame_data += i
frame = img_decode(frame_data)
frame_buffer.put(frame)
break
end = time.process_time()
run_time += start-end
if run_time > 0.1 :
break
#predict and send to client
if frame_buffer.empty() is False and frame_buffer.qsize() > 1:
try:
classes, scores, boxes = model.detect(frame_buffer.get(), CONFIDENCE_THRESHOLD, NMS_THRESHOLD)
for (classid, score, box) in zip(classes, scores, boxes):
color = COLORS[int(classid) % len(COLORS)]
label = "%s : %f" % (class_names[int(classid)], score)
cv2.rectangle(frame, box, color, 2)
cv2.putText(frame, label, (box[0], box[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 1, color, 2)
tempList = {"name":"box_info","box":box.tolist(),"label":label,"color":color}
json_str = json.dumps(tempList)
s.sendto(json_str.encode(), addr)#發送數據有問題
packs_info = None
except:
print("pass")
if frame is not None and type(frame) == np.ndarray:
cv2.imshow("Stream", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
breakThe End
 python chinese_ Calendar working day, holiday day and compensatory leave day judgment
python chinese_ Calendar working day, holiday day and compensatory leave day judgment
Load the library import dateti
 The interviewer said that those who do not understand Python decorators refuse directly
The interviewer said that those who do not understand Python decorators refuse directly
01 Decorator Python The decora