Want to get a real-time runner ManhattanSLAM, Switch to ROS Interface , compile ManhattanSLAM-ros Report errors :
Call Stack (most recent call first):
CMakeLists.txt:3 (include)
[rosbuild] Building package ManhattanSLAM-ros
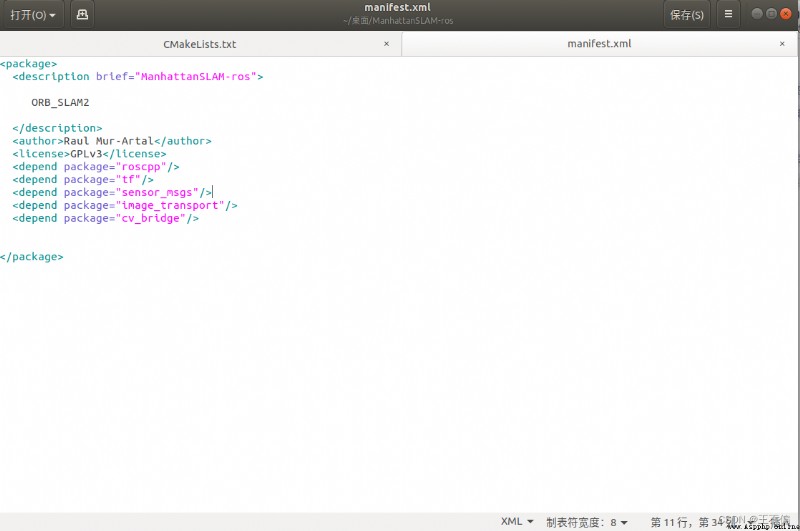
[rosbuild] Error from syntax check of ManhattanSLAM-ros/manifest.xml
Traceback (most recent call last):
File "<string>", line 1, in <module>
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslib/manifest.py", line 146, in parse_file
return roslib.manifestlib.parse_file(Manifest(), file)
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslib/manifestlib.py", line 532, in parse_file
raise ValueError('Invalid/non-existent manifest file: %s' % file)
ValueError: Invalid/non-existent manifest file: manifest.xml
CMake Error at /opt/ros/melodic/share/ros/core/rosbuild/private.cmake:77 (message):
[rosbuild] Syntax check of ManhattanSLAM-ros/manifest.xml failed; aborting
Call Stack (most recent call first):
/opt/ros/melodic/share/ros/core/rosbuild/public.cmake:174 (_rosbuild_check_manifest)
CMakeLists.txt:4 (rosbuild_init)
resolvent :
from ORB——SLAM2 On copy Here comes one manifest.xml, After that, change the name in it to the corresponding one ManhattanSLAM-ros that will do .