(1)圖像搜索:以圖搜索;
(2)拼圖游戲;
(3)圖像拼接:將兩張有關聯的圖拼接在一起;
圖像特征就是指有意義的圖像區域,具有獨特性,易識別性,比如角點,斑點以及高密度區域。
角點:在特征中最重要就是角點;灰度梯度的最大值對應的像素;兩條線的交點;極值點(一階導數最大,二階導數為0)
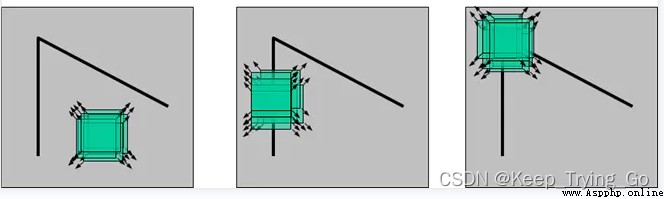
第一幅圖矩形表示一個平坦區域,在各方向移動,窗口內像素值沒有變化;
第二幅圖矩形表示一個邊緣特征(Edges),如果沿著垂直方向移動(梯度方向),像素值會發生改變;如果沿著邊緣移動(平行於邊緣) ,像素值不會發生變化;
第三幅圖矩形框來說,它是一個角(Corners),不管你把它朝哪個方向移動,像素值都會發生很大變化。
該算法算子對亮度和對比度的變化不敏感。
算子具有旋轉不變性。
算子不具有尺度不變性。
cornerHarris(src, blockSize, ksize, k, dst=None, borderType=None)
Src:輸入的原始圖像;
Blocksize:檢測窗口的大小
Ksize:卷Sobel積核的大小;
K:權重系數,經驗值,一般取0.02-0.04之間。
Dst:輸出的圖像
borderType:⽤於推斷圖像外部像素的某種邊界模式,有默認值BORDER_DEFAULT.
import os
import cv2
#讀取圖片
img=cv2.imread('images/HaLiSi.jpg')
#縮放圖片
img=cv2.resize(src=img,dsize=(450,450))
#轉灰度圖
gray=cv2.cvtColor(src=img,code=cv2.COLOR_RGB2GRAY)
#哈裡斯檢測
halisi=cv2.cornerHarris(src=gray,blockSize=2,ksize=3,k=0.03)
#判斷角點的“質量”
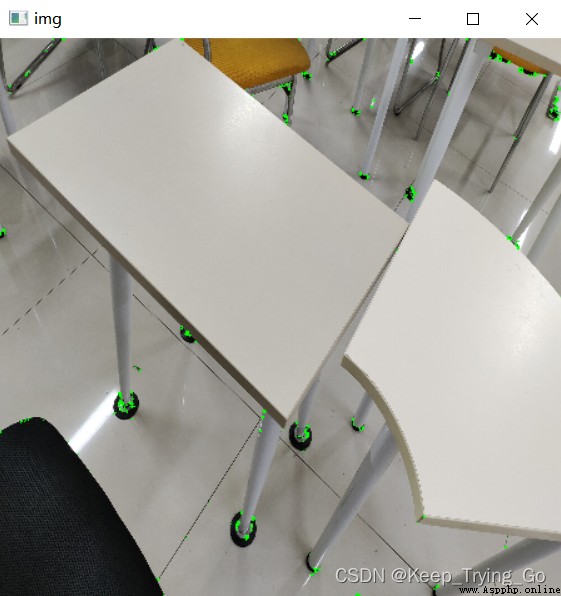
img[halisi>0.01*halisi.max()]=[0,255,0]
#顯示圖像
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
 [Python crawler] crawl the hero and skin image data of the League of Heroes
[Python crawler] crawl the hero and skin image data of the League of Heroes
Remember those days when we ha
 Influence of distributed generation on distribution network fault location (implemented by Python code)
Influence of distributed generation on distribution network fault location (implemented by Python code)
Catalog 1 summary 2 The goal i




