blob Only black spots on the inside and white spots on the outside can be detected
If you want to detect white spots inside and black spots outside , Then the image should be inverted
img_inv = 255 - img
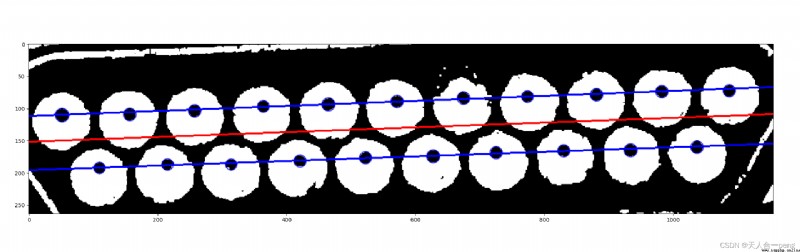
Original picture

Test result chart
plt
opencv

# coding:utf-8
import math
import cv2
import numpy as np
import xml.etree.ElementTree as ET
import random
import matplotlib.pyplot as plt
def get_distance_point2line(point, line_ab): # Find the distance from the point to the straight line
"""
Args:
point: [x0, y0]
line_ab: [k, b]
"""
k, b = line_ab
distance = abs(k * point[0] - point[1] + b) / math.sqrt(k ** 2 + 1)
return distance
# Vertical and horizontal lines are not considered
def drawLines(img, allCirclesCenter):
# Calculate the centerline of two rows of points
nptest = np.array(allCirclesCenter)
line = cv2.fitLine(nptest, cv2.DIST_L2, 0, 0.001, 0.0)
# print(line)
k = line[1] / line[0]
b = line[3] - k * line[2]
# If it is a horizontal line
if k <= 10e-5:
pass
# If it is vertical
if k > 10e5:
pass
print('y = {:0.8f}x + {:0.8f}'.format(k[0], b[0]))
ptStart, ptEnd = (0, int(k * 0 + b)), (img.shape[1], int(k * img.shape[1] + b))
# The coordinate point needs to be modified to obtain an integer *************** Draw a line that covers the whole picture
cv2.line(img, ptStart, ptEnd, (0, 0, 255), thickness=2, lineType=3)
# cv2.imshow("line", img)
# cv2.waitKey()
# Distinguish the upper and lower points , Fit two straight lines
line1_yx, line2_yx = [], []
for i in allCirclesCenter:
if i[1] < float(k * i[0] + b):
line1_yx.append(i)
else:
line2_yx.append(i)
# line1 Find the first straight line
nptest1 = np.array(line1_yx)
line1 = cv2.fitLine(nptest1, cv2.DIST_L2, 0, 0.01, 0.0)
k1 = line1[1] / line1[0]
b1 = line1[3] - k1 * line1[2]
# print(line1)
print('line1')
print('y = {:0.8f}x + {:0.8f}'.format(k1[0], b1[0]))
for i in line1_yx: # Display the distance from the point to the line
point = i
line_ = k1, b1
dis = get_distance_point2line(point, line_)
# print(' distance : ' + str(dis))
ptStart, ptEnd = (0, int(k1 * 0 + b1)), (img.shape[1], int(k1 * img.shape[1] + b1))# The coordinate point needs to be modified to obtain an integer ***************
cv2.line(img, ptStart, ptEnd, ( 255, 0, 0), 2)
# cv2.imshow("line1", img)
# lin2 Find the second straight line
nptest2 = np.array(line2_yx)
line2 = cv2.fitLine(nptest2, cv2.DIST_L2, 0, 0.01, 0.0)
k2 = line2[1] / line2[0]
b2 = line2[3] - k2 * line2[2]
# print(line2)
print('line2')
print('y = {:0.8f}x + {:0.8f}'.format(k2[0], b2[0]))
ptStart, ptEnd = (0, int(k2 * 0 + b2)), (img.shape[1], int(k2 * img.shape[1] + b2)) # The coordinate point needs to be modified to obtain an integer ***************
cv2.line(img, ptStart, ptEnd, ( 255, 0, 0), 2) # The pixel value must be an integer ****************
# cv2.imshow("line2", img)
# cv2.waitKey()
imgNormal = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(imgNormal)
plt.show()
def mainFigure(img):
paramsOut = cv2.SimpleBlobDetector_Params()
# Setup SimpleBlobDetector parameters.
# print('params')
# print(params)
# print(type(params))
# Filter by Area.
paramsOut.filterByArea = True
paramsOut.minArea = 5000
paramsOut.maxArea = 10e3
paramsOut.minDistBetweenBlobs = 25
paramsOut.filterByColor = True
paramsOut.filterByConvexity = False
paramsOut.minThreshold = 10
paramsOut.maxThreshold = 30*2.5
# tweak these as you see fit
# Filter by Circularity
# params.filterByCircularity = False
# params.minCircularity = 1
# params.blobColor = 0
# # # Filter by Convexity
# params.filterByConvexity = True
# params.minConvexity = 1
# Filter by Inertia
# params.filterByInertia = True
# params.filterByInertia = False
# params.minInertiaRatio = 0.1
gray_src= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Detect blobs.
# image = cv2.resize(gray_img, (int(img.shape[1]/4),int(img.shape[0]/4)), 1, 1, cv2.INTER_LINEAR)
# image = cv2.resize(gray_img, dsize=None, fx=0.25, fy=0.25, interpolation=cv2.INTER_LINEAR)
minThreshValue = 35
_, gray = cv2.threshold(gray_src, minThreshValue, 255, cv2.THRESH_BINARY)
gray = cv2.resize(gray, dsize=None, fx=1, fy=1, interpolation=cv2.INTER_LINEAR)
# cv2.imshow("gray1",gray)
kernel = np.ones((3, 3), dtype=np.uint8)
gray = cv2.dilate(gray, kernel, 1) # 1: The number of iterations , That is, perform several expansion operations
gray = cv2.erode(gray, kernel, 1)
# plt.imshow(gray)
# cv2.imshow("gray",gray)
# Find the origin (0,0) Nearest and farthest point
# Detect outer circle
detector = cv2.SimpleBlobDetector_create(paramsOut)
keypoints = detector.detect(gray)
# opencv
im_with_keypoints = cv2.drawKeypoints(gray, keypoints, np.array([]), (255, 0, 0), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# im_with_keypoints = cv2.drawKeypoints(img, keypoints, np.array([]), (0, 255, 0), cv2.DRAW_MATCHES_FLAGS_DEFAULT)
# print(keypoints)
# cv2.imshow("zero_gray", gray)
# Detect the inner circle Image reversal
paramsIn = cv2.SimpleBlobDetector_Params()
paramsIn.filterByArea = True
paramsIn.minArea = 100
paramsIn.maxArea = 500
paramsIn.minDistBetweenBlobs = 10
paramsIn.filterByColor = True
paramsIn.filterByConvexity = False
paramsIn.minThreshold = 30
paramsIn.maxThreshold = 30*2.5
# Image reversal
needleGray = 255 - gray.copy()
cv2.imshow('needleGray', needleGray)
detector2 = cv2.SimpleBlobDetector_create(paramsIn)
needleKeypoints = detector2.detect(needleGray)
# opencv
needle_keypoints = cv2.drawKeypoints(needleGray, needleKeypoints, np.array([]), (255, 0, 0),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
allNeedlePoints = []
if keypoints is not None:
for i in range(len(needleKeypoints)):
allNeedlePoints.append(needleKeypoints[i].pt)
# Impossible, most of them are oblique , Fit directly according to most point sets
# print(allCirclesCenter)
# if allCirclesCenter is not None:
if len(allNeedlePoints) > 10:
drawLines(needle_keypoints, allNeedlePoints)
color_img = cv2.cvtColor(im_with_keypoints, cv2.COLOR_BGR2RGB)
needle_img = cv2.cvtColor(needle_keypoints, cv2.COLOR_BGR2RGB)
cv2.imshow('holeShow', color_img)
cv2.imshow('needleShow', needle_img)
cv2.waitKey()
if __name__ == "__main__":
# # # Single picture test
# img = cv2.imread("images/HenFeng/HF01.jpg",1)
# img = cv2.imread("images/Snap_0.jpg",1)
# img = cv2.imread("images/Holes/Hole2.jpg",1)
# mainFigure(img)
# # All picture tests
for i in range(5):
fileName = "Zhen" + str(i+1) + ".jpg"
# img = cv2.imread("circles/Snap_007.jpg",1)
img = cv2.imread("images/ZhenJiao/" + fileName,1)
print(fileName)
mainFigure(img)
 Why are so many people learning Python? Look at the demand and employment salary
Why are so many people learning Python? Look at the demand and employment salary
Python This year is the top 3
 pandas.errors.ParserError: Error tokenizing data. C error: Expected 1 fields in line 5, saw 3
pandas.errors.ParserError: Error tokenizing data. C error: Expected 1 fields in line 5, saw 3
問題描述:python程序報錯:”pandas.errors